
Hao Fang
Doctor of Philosophy
Department of Electrical and Computer Engineering
University of Washington
Seattle, WA, 98195, USA
Contact email: haof459@uw.edu or haof459@gmail.com
Office: ECE 432
Doctor of Philosophy
Department of Electrical and Computer Engineering
University of Washington
Seattle, WA, 98195, USA
Contact email: haof459@uw.edu or haof459@gmail.com
Office: ECE 432
Hao Fang is a Postdoctoral Scholar under the supervision of Prof. Amy L. Orsborn at the University of Washington. He received his Ph.D. degree under the supervision of Prof. Yuxiao Yang from the University of Central Florida, FL, USA, in 2023.
During his Ph.D., he leveraged the expertise in machine learning, stochastic dynamical systems, and neuroscience to build brain-computer interfaces (BCIs) for decoding and controlling the brain state.
His research interests include machine learning, BCIs, robotics, and large language models (LLMs).
Waiting connections!
I am a Postdoctoral Scholar at the University of Washington. I have wide interests and solid skills in brain-computer interfaces (BCIs), large language models (LLMs), generative AI, and robotics. Now, I am looking for a full-time research scientist in the industry. Feel free to connect wtih me!
My past research focuses on brain-computer interfaces (BCIs) with wide of interesting areas and projects. Please check the details below.
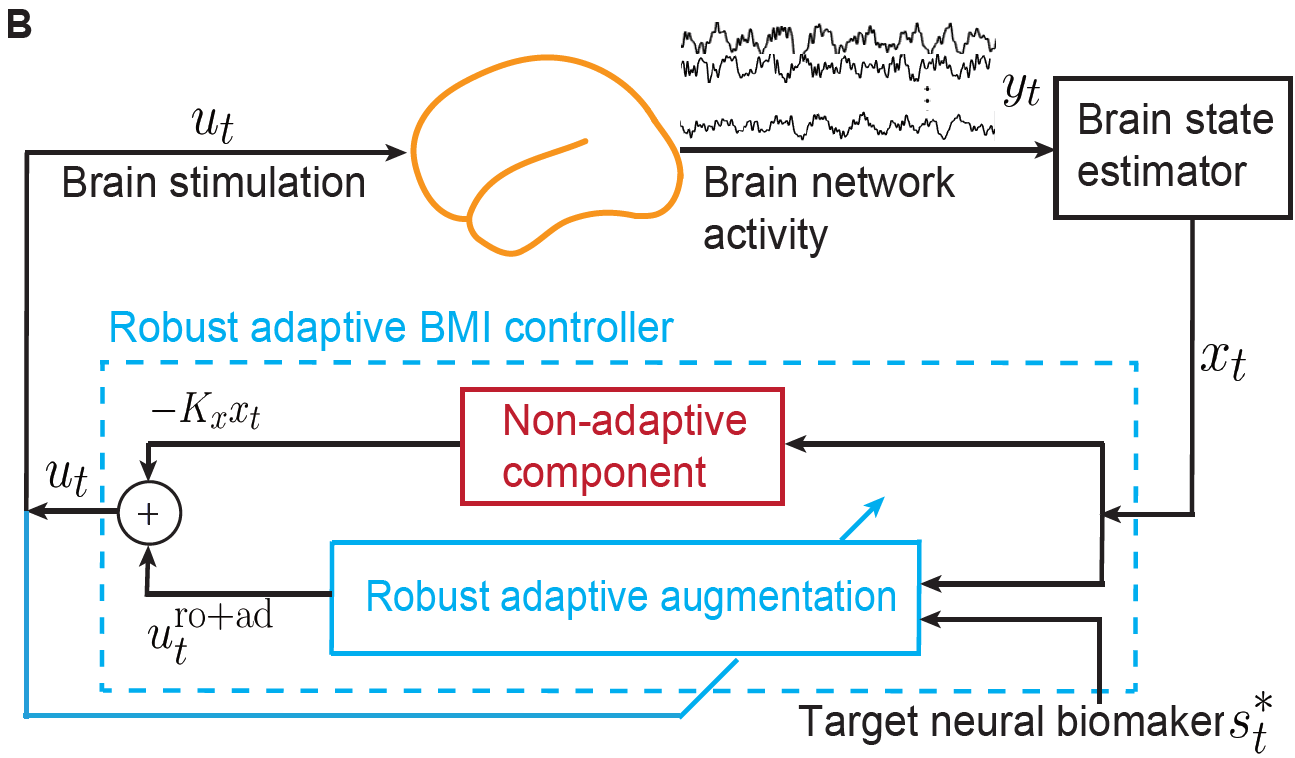
Neuromodulation systems that use closed-loop brain stimulation can provide new therapies for brain disorders. We developed a robust adaptive neuromodulation algorithm to accurately track various types of target brain state trajectories, enable stable control, and outperform state-of-the-art algorithms.
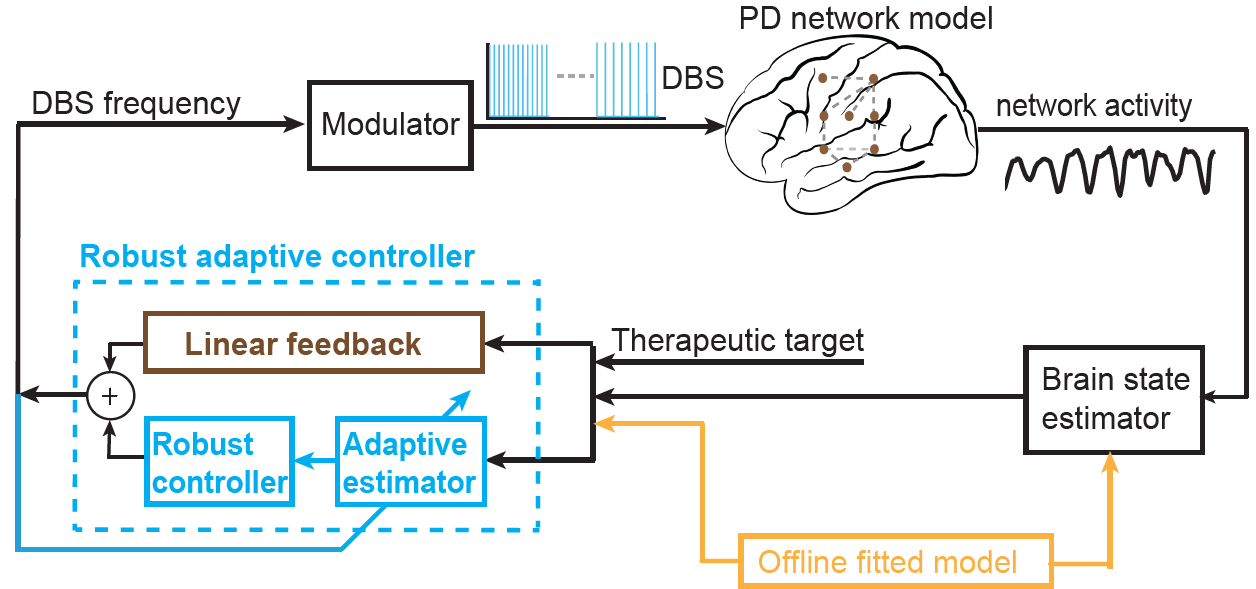
We propose a robust adaptive DBS algorithm for treating Parkinson's disease that addresses the nonlinear, non-stationary, and noisy nature of PD network activity, achieving precise control across different therapeutic targets and outperforming current DBS algorithms.
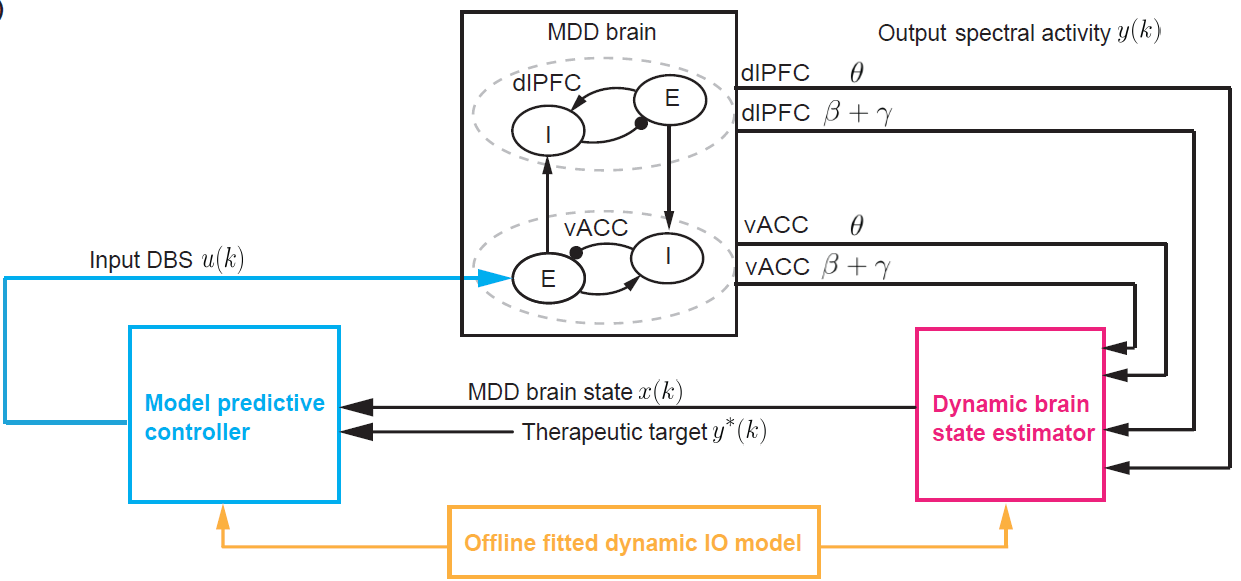
We developed a closed-loop BCI system of predictive neuromodulation for treating MDD, using a biophysically plausible neural mass model and model predictive control to accurately regulate neural dynamics with lower power consumption than conventional approaches.
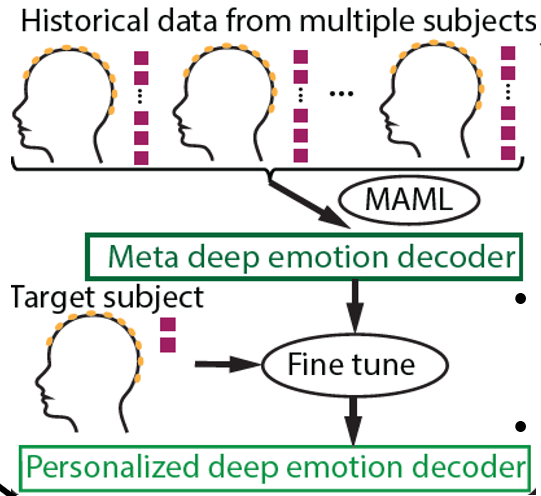
We propose a plug-and-play model-agnostic meta-learning framework (Pnp-MAML) to efficiently learn a generalizable emotion decoder that can quickly adapt to unknown subjects, achieving state-of-the-art inter-subject emotion recognition accuracy across multiple datasets.
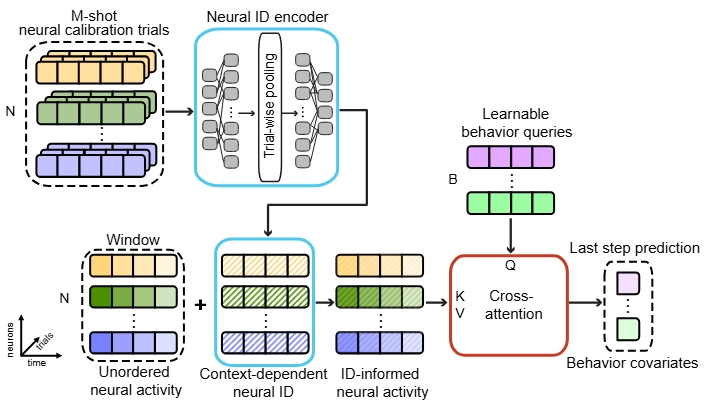
SPINT is a novel spatial permutation-invariant neural transformer that addresses the challenge of consistent motor decoding from intracortical recordings, providing improved robustness and generalization for brain-computer interface applications.
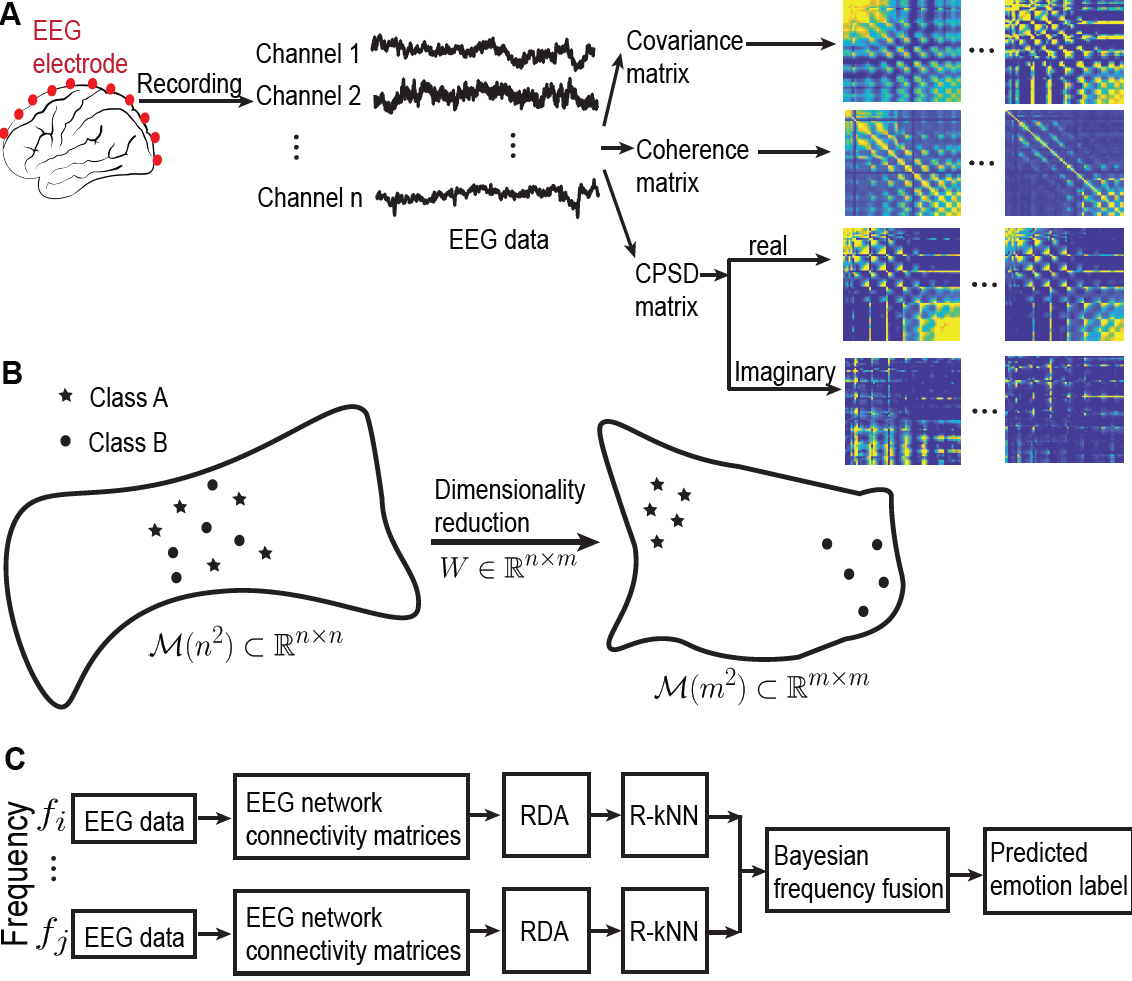
We developed a new Riemannian discriminant analysis method for emotion recognition from EEG connectivity matrices. This approach projects connectivity onto a low-dimensional Riemannian manifold and aggregates spectral information, outperforming state-of-the-art methods on three datasets.
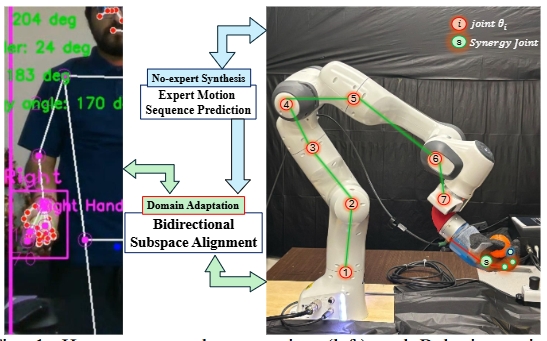
This research explores cross-embodiment transfer learning for robotic manipulation, enabling robots to learn from demonstrations with different embodiments through a novel CycleVAE architecture and Human Behavior Transformer.
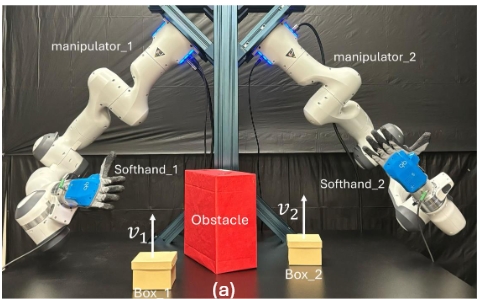
APEX is a novel framework for dual-arm robotic manipulation that uses a collision-free generative diffusion model to coordinate the movement of both arms, enabling ambidextrous manipulation capabilities for complex tasks.
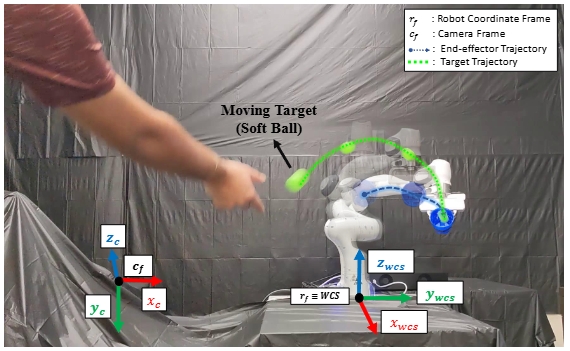
We developed a unified control framework using diffusion variational autoencoders that enables robots to intercept flying objects while avoiding obstacles, combining trajectory prediction and real-time adaptive control.
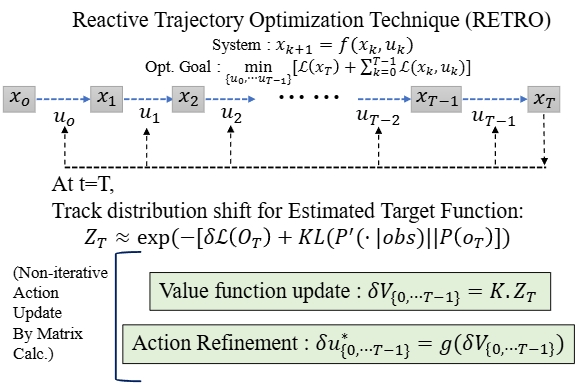
RETRO addresses the challenge of reactive trajectory optimization for robots operating in dynamic environments, enabling real-time motion planning that can adapt to rapidly changing conditions and obstacles.
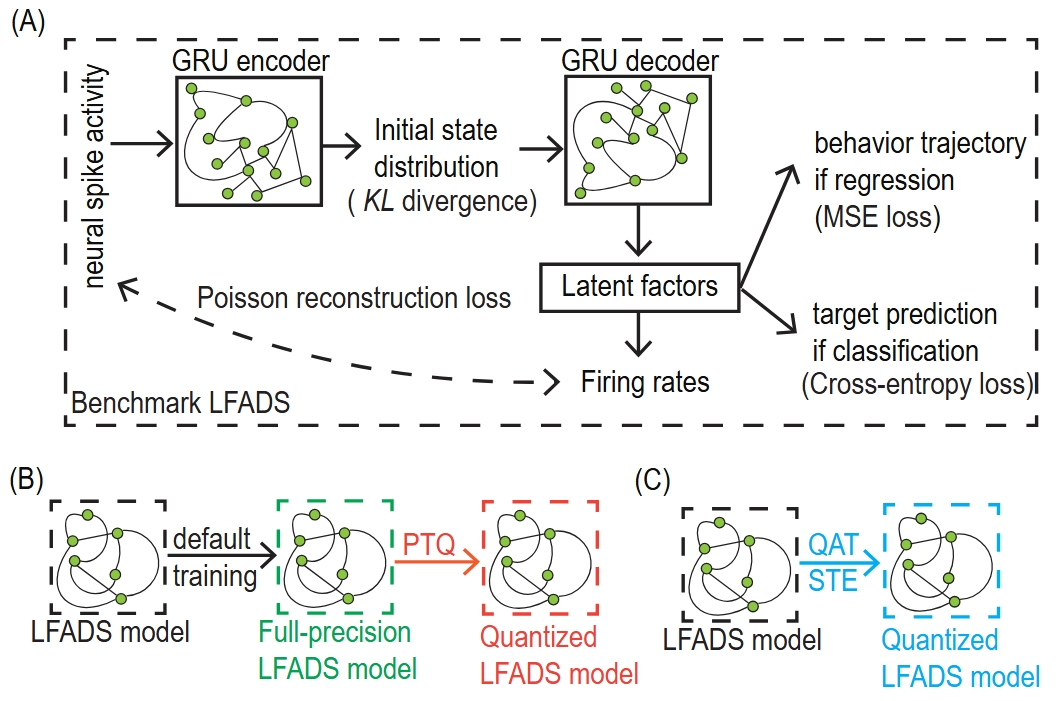
This research explores quantization-aware training methods to develop lightweight and fast neural decoders for brain-computer interfaces, optimizing the trade-off between computational efficiency and decoding accuracy for hardware implementation.
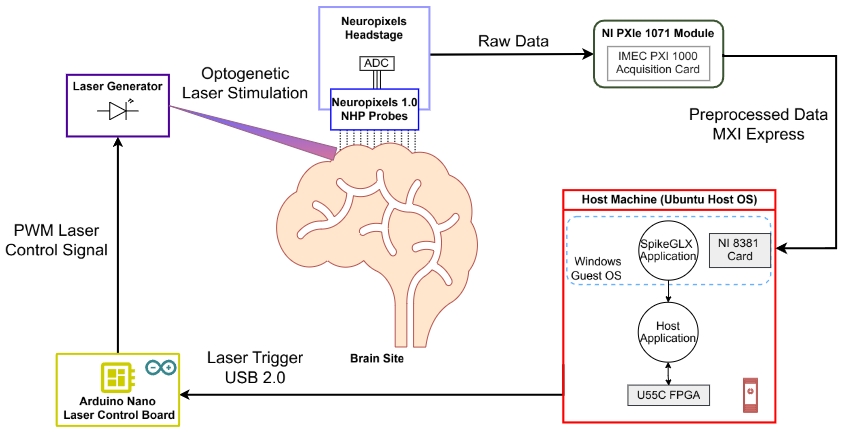
This research focuses on the co-design of hardware and software systems for next-generation integrated brain-computer interfaces, addressing challenges in power efficiency, computational capacity, and real-time processing for clinical applications.